
盖世汽车讯 攀爬机器人在现实世界中可能有许多有价值的应用,从完成屋顶或其他高层建筑的维护任务到为难以到达的地点运送包裹或救生包。然而,为了成功部署在现实世界中,这些机器人应该能够有效地感知和绘制周围环境,同时准确它们在地图环境中的位置。

图片来源于网络,如有侵权,请联系删除
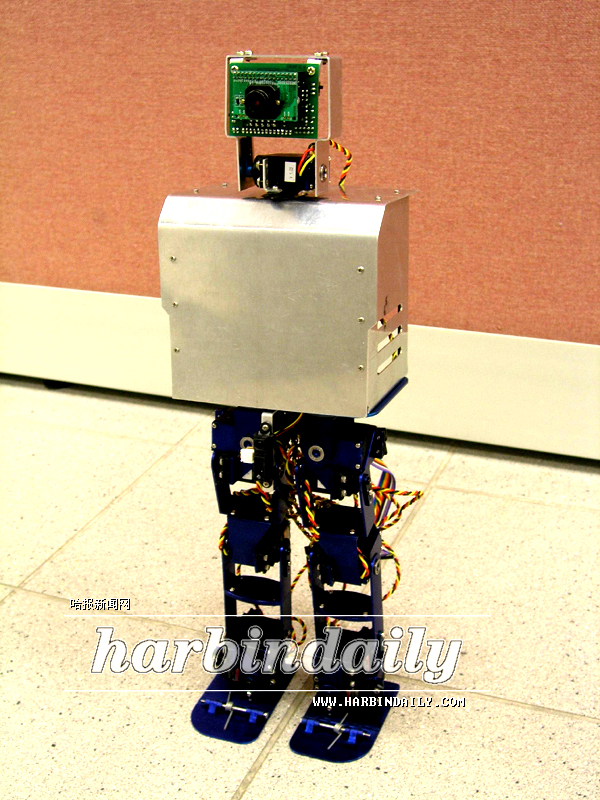
据外媒报道,广东工业大学的研究人员最近开发出新方法,可以增强双足攀爬机器人在攀爬桁架(即由直互连元件组成的三角形系统,可以是桥梁、屋顶或其他人造结构)。相关研究论文发表于期刊《Robotics and Autonomous Systems》,详细介绍了基于同步定位与建图(SLAM)算法。
图片来源于网络,如有侵权,请联系删除
图片来源:期刊《Robotics and Autonomous Systems》
“我们最近的工作将SLAM方法部署到一个特定的双足攀爬机器人(BiCR)上,该机器人由我们的实验室(名为仿生和智能机器人实验室)开发,”该论文的合著者陈伟楠表示。
“BiCR是一种类似于移动机械手的机电系统,能够通过两端的夹具进行移动并通过多个关节进行旋转。该机器人可用于高空和高风险环境中的安装、维护和检查,例如作为建筑工地脚手架和电力塔。”
版权声明
本文仅代表作者观点,不代表百度立场。
本文系作者授权百度百家发表,未经许可,不得转载。
相关阅读
-

统计局:4月小汽车价格降幅收窄
5月11日,国家统计局发布了2024年4月全国CPI和PPI数据。图片来源于网络,如有侵权,请联系删除 国家统计局城市司首席统计师董莉娟解读,4月,居民消费需求持续恢复,全国CPI环比由降转涨,同比涨幅扩大。工业生产继续恢复,部分行业需求阶段性回落,全国PPI环比有所下降,同比降幅收窄。图片来源于网络,如有侵权,请联系删除 聚焦汽车产业,4月,扣除能源的工业消费品价格同比上涨0.4%,涨幅扩大0.3个百分点,其中燃油小汽车和小汽车价格分别下降4.8%和6.5%,降幅均有收窄。...
-

一季度全球Top 20电动汽车榜单:中国占16席,外国车仅4款
谁说全球电动车销售不景气?CleanTechnica的数据显示,今年3月份,全球销量(包括纯电动车和插电式混合动力车)同比上涨19%至1,314,687辆,是有史以来销量第三好的月份,仅次于去年12月(1,556,728辆)和11月(1,385,000辆)。得益于3月份的强劲销量,今年第一季度,全球电动汽车累计销量达到3,216,366辆,同比增长逾25%,电动汽车市场份额也上升了2个百分点到16%,其中纯电动汽车占据10%的市场份额。图片来源于网络,如有侵权,请联系删除 中...
-
前4月我国新能源汽车销售294万辆 出口超42万辆
4月,我国车产销分别完成87万辆和85万辆,同比分别增长35.9%和33.5%。1-4月,我国新能源车产销分别完成298.5万辆和294万辆,同比分别增长30.3%和32.3%。图片来源于网络,如有侵权,请联系删除 图片来源于网络,如有侵权,请联系删除 5月11日,中汽协最新数据显示,4月,我国经济景气水平总体延续扩张,三大指数继续保持在扩张区间,制造业企业生产继续加快、市场需求继续恢复、企业对近期市场发展信心总体稳定。我国汽车产销环比下降,同比呈现较快增长,其中和...
-

印度最大汽车制造商马鲁蒂铃木季度利润上涨48%,超出预期
盖世汽车讯 据彭博社报道,上个季度,由于SUV车型的销量表现突出,印度最大的汽车制造商马鲁蒂铃木印度有限公司(Maruti Suzuki India Ltd.)的利润超出预期。图片来源于网络,如有侵权,请联系删除 图片来源: 马鲁蒂铃木 4月26日,马鲁蒂铃木在一份提交给证券交易所的文件中表示,在截至3月31日的三个月里,该公司的净利润较上年同期增长48%,至388亿卢比(约合4.66亿美元),略高于分析师383.9亿卢比的平均预期。该公司指出,利润增长是“由于销...
-

镜泰一季度营收和净利润实现双增长,维持全年预期
盖世汽车讯 据《美国汽车新闻》报道,今年第一季度,汽车后视镜和技术供应商镜泰(Gentex Corp.)的营收和净利润增长强劲,主要是因为其高科技后视镜和其他先进产品的销量增幅跑赢大盘。图片来源于网络,如有侵权,请联系删除 图片来源于网络,如有侵权,请联系删除 图片来源:镜泰 根据镜泰发布的财报,今年前三个月,其净销售额为5.902亿美元,而2023年第一季度的净销售额为5.508亿美元,同比增长7%。相比之下,北美、欧洲和日本/韩国第一季度的轻型下降了3%。此外,...
-

加州理工学院开发虚拟传感器 帮助飞行器在旋翼发生故障时保证安全
盖世汽车讯 无需水晶球就能想象出工程师心目中的未来,即空中出租车和其他飞行器在城市之间运送乘客,避免地面上日益严重的交通堵塞。许多公司已经在原型设计和测试这种混合动力电动“飞行汽车”。这种汽车可以垂直起飞和降落,但也可以像有翼飞机一样在空中翱翔,从而实现更远距离的高效飞行。图片来源于网络,如有侵权,请联系删除 当然,这些飞行汽车关注的关键领域之一是安全性。这些飞行汽车不仅必须保持在空中,而且必须保持控制,无论飞行过程中可能出现什么问题,如阵风,或者在其路径上出现飞行的物体,以...